
Sustainable trust in Human-Robot Interaction
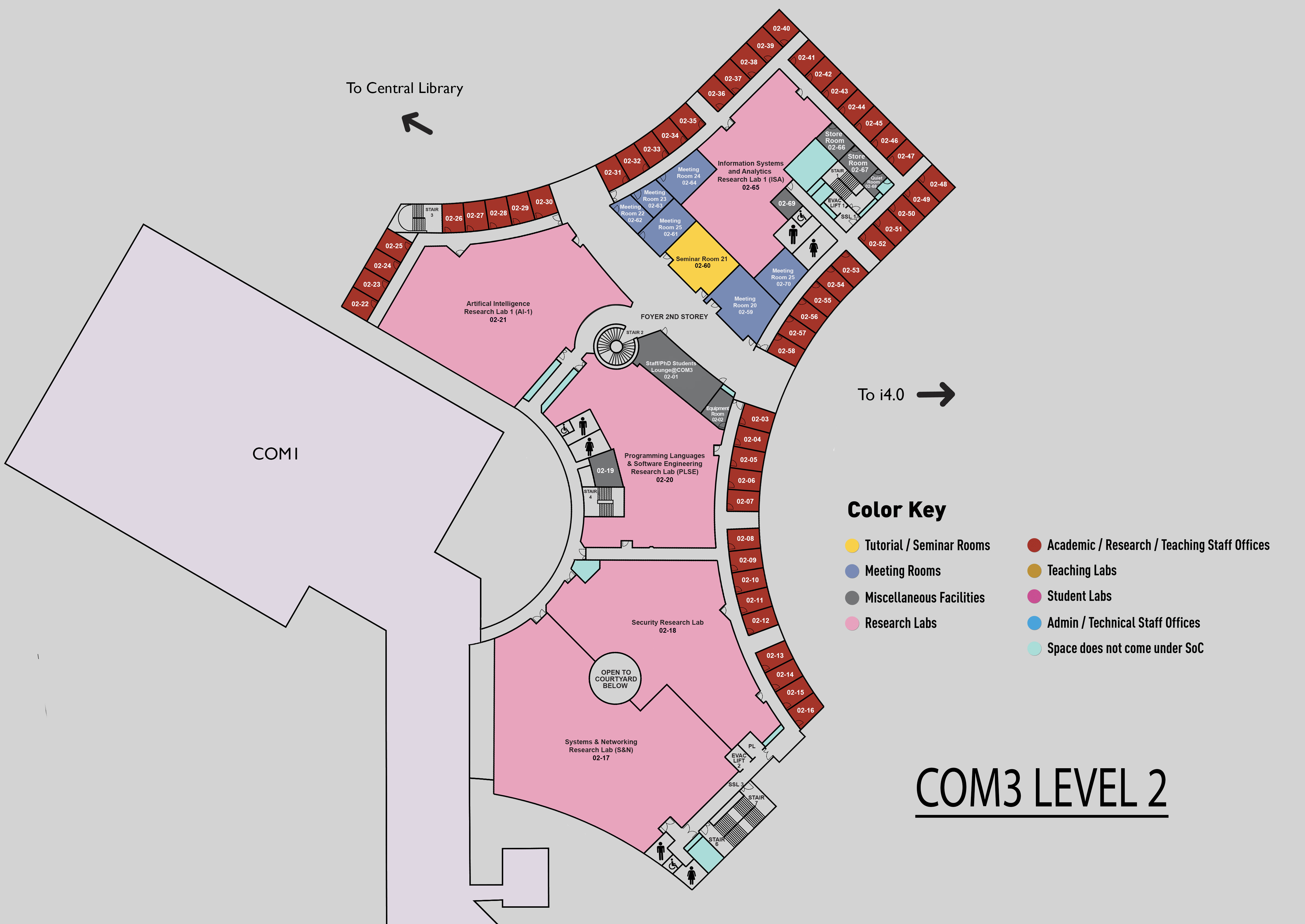
COM3 Level 2
SR21, COM3 02-60
Abstract:
Many factors, including visual and vocal cues, people's existing attitudes, and contextual information, shape how humans form initial trust in robots. Much less is known about how these factors influence the maintenance and evolution of trust over time, or how they interact with people's direct experience of a robot's actual performance. In this talk, I will present a series of experiments demonstrating that first impressions have a surprisingly persistent effect in continuing to shape whether people trust a robot, even when its subsequent behaviour clearly suggests that this robot should not be trusted. I will also discuss strategies that robots can use to recover trust after errors and to support more appropriate long-term trust calibration.
Bio:
Ilaria Torre is an Assistant Professor in Human-Robot Interaction at Chalmers University of Technology in Sweden. Previously, she was a postdoctoral researcher at KTH Royal Institute of Technology, Sweden, and a Marie Sk??odowska-Curie postdoctoral fellow at Trinity College Dublin, Ireland, after obtaining her PhD from the University of Plymouth, UK, in 2017. Her research centers around improving communication between humans and robots. This includes both verbal (e.g. designing appropriate voices for robots) and nonverbal communication (e.g. investigating how sounds or other nonverbal signals can intuitively communicate information in cases where the robot cannot, or should not, use language).