
Learning Versatile, Language Conditioned Robot Behavior Efficiently
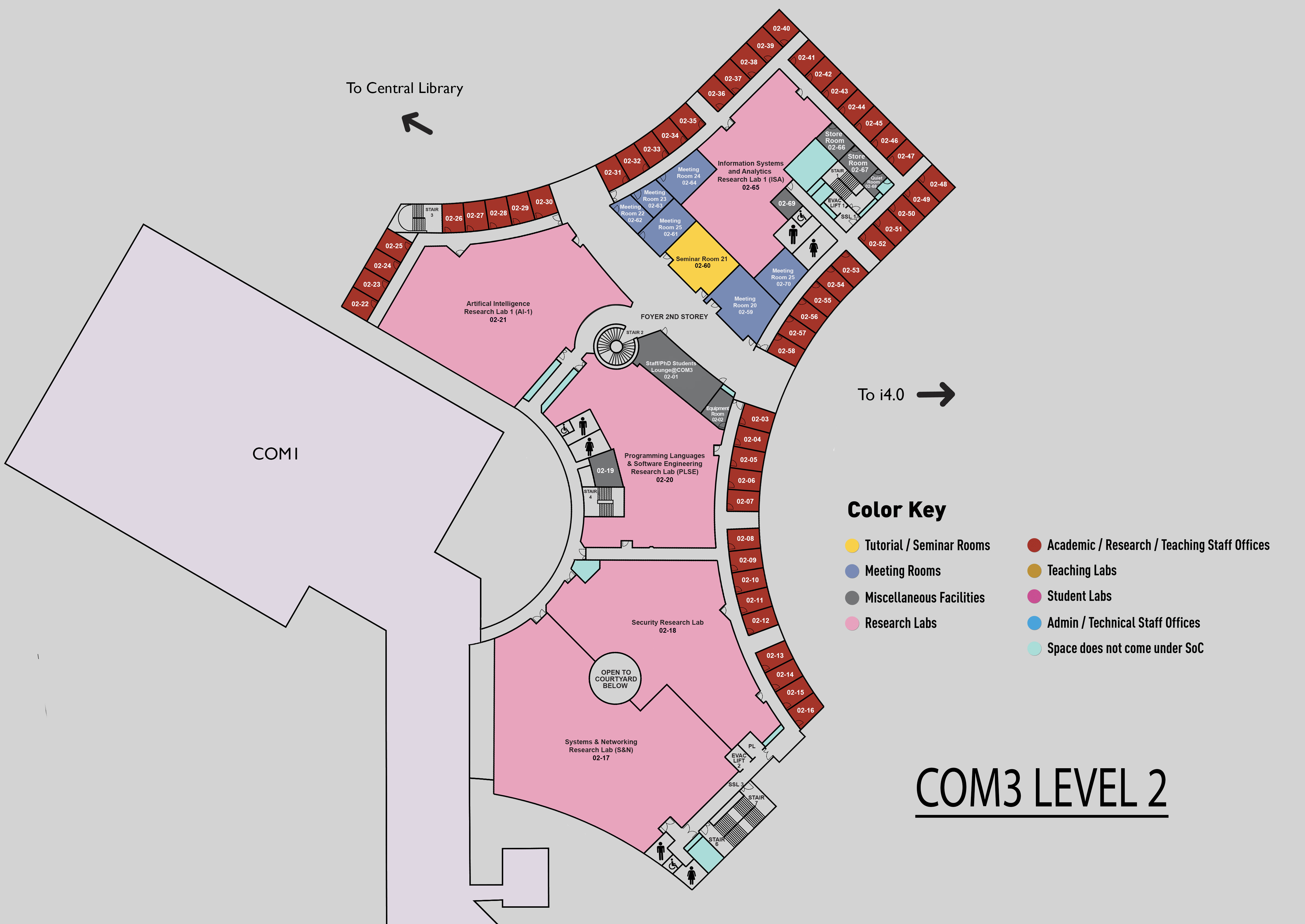
COM3 Level 2
MR21, COM3 02-61
ABSTRACT:
Generative models, including Vision-Language Models and diffusion-based approaches, are enabling new possibilities for robot learning with versatile, language-conditioned behaviors. However, significant challenges persist in making these capabilities practical and efficient: reducing data requirements, minimizing computational costs, streamlining human demonstration effort, and ensuring smooth, deployable robot trajectories. This talk presents some of our research addressing these complex challenges through innovations in automated data labeling, benchmarking, immersive demonstration collection, and advanced movement primitives. Our contributions include novel score-based diffusion policies and vision-language-action models that optimize computational resources while significantly outperforming current state-of-the-art approaches on several benchmarks. These advances bring us closer to robots that can understand natural language instructions and execute diverse behaviors efficiently across a wide range of tasks.
BIO:
Rudolf Lioutikov is a tenure track professor for machine learning and robotics at the Karlsruhe Institute of Technology, Germany. He started the Intuitive Robots Lab in June 2021 after being accepted into the Emmy-Noether Programme by the German Research Foundation. The Lab develops new methods to facilitate human-robot interaction and collaboration. Previously Rudolf was an Assistant Professor of Practice at the University of Texas at Austin. Rudolf was awarded his Ph.D. with distinction by the Technical University of Darmstadt in 2018. His dissertation on the "Imitation Learning Pipeline" was nominated as a finalist for the Georges Giralt PhD Award by the European Robotics Federation.