
Integrating Planning and Learning for Intelligent Robots
Professor of Computer Science and Engineering at the Computer Science and Artificial Intelligence Laboratory (CSAIL) at the Massachusetts Institute of Technology
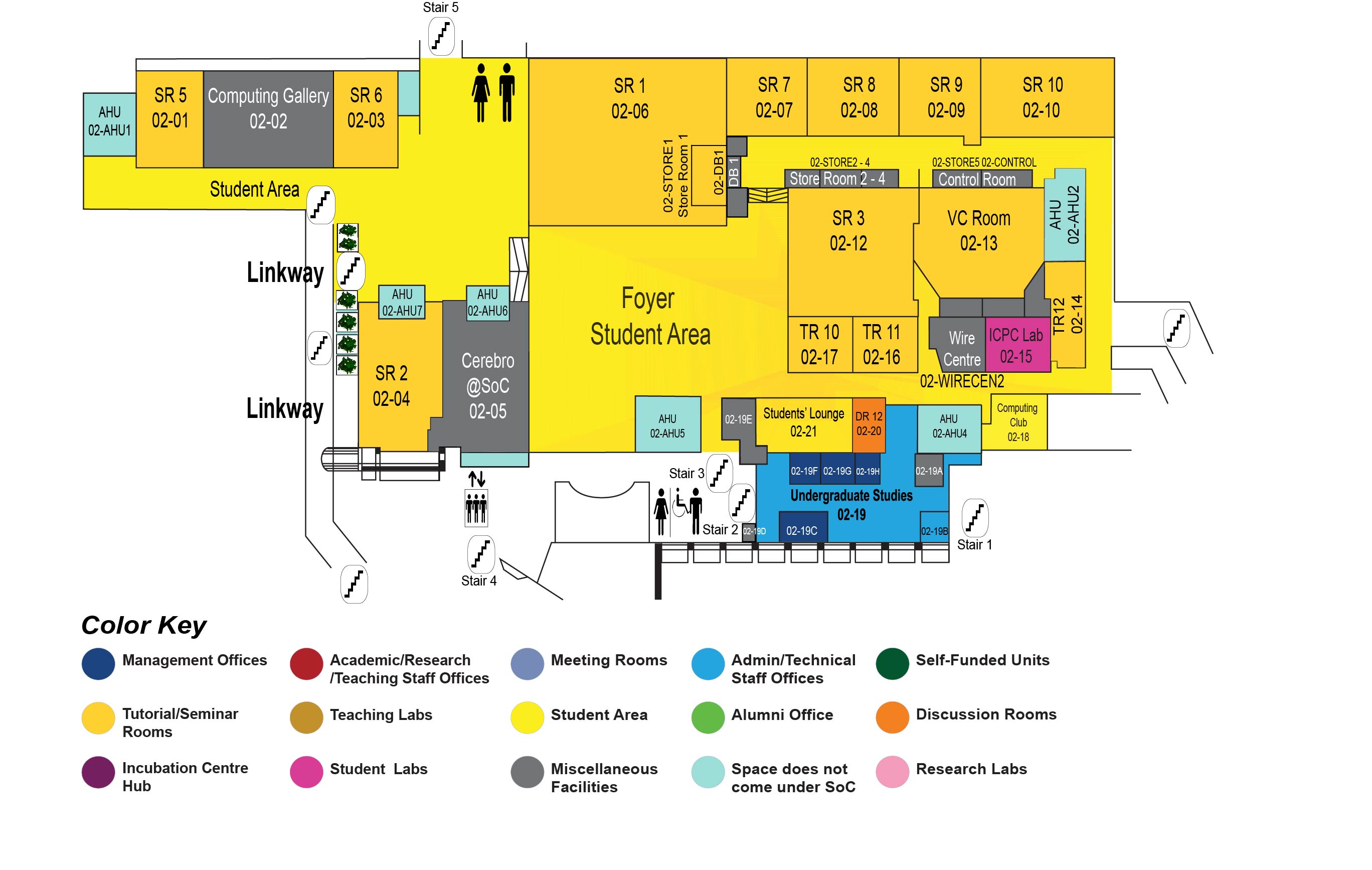
COM1 Level 2
SR1, COM1-02-06 *REFRESHMENT at 3.30pm
Abstract:
The fields of AI and robotics have made great improvements in many individual subfields, including in motion planning, symbolic planning, probabilistic reasoning, perception, and learning. Our goal is to develop an integrated approach to solving very large problems that are hopelessly intractable to solve optimally. We make a number of approximations during planning, including serializing subtasks, factoring distributions, and determinizing stochastic dynamics, but regain robustness and effectiveness through a continuous state-estimation and replanning process. I will describe our initial approach to this problem, as well as recent work on improving effectiveness and efficiency through multiple types of learning.
Biodata:
Leslie Pack Kaelbling is Professor of Computer Science and Engineering at the Computer Science and Artificial Intelligence Laboratory (CSAIL) at the Massachusetts Institute of Technology. She has made research contributions to decision-making under uncertainty, learning, and sensing with applications to robotics, with a particular focus on reinforcement learning and planning in partially observable domains. She holds an A.B in Philosophy and a Ph.D. in Computer Science from Stanford University, and has had research positions at SRI International and Teleos Research and a faculty position at Brown University. She is the recipient of the US National Science Foundation Presidential Faculty Fellowship, the IJCAI Computers and Thought Award, and several teaching prizes and has been elected a fellow of the AAAI. She was the founder and editor-in-chief of the Journal of Machine Learning Research.