
Talk 1: Model of Strategic Behavior for Interaction that Guide Others Internal State
Talk 2: Interaction Design for HRI
Talk 3: Human-Agent Interaction: Utilizing Social Intelligence with Agential Triggers
Talk 4: Social Robots that Can Feel the Mood and Share Attention by Entrainment Effects
Tamagawa University, Japan
Speaker 2: Professor Michita Imai
Keio University, Japan
Speaker 3: Dr. Hirotaka Osawa
University of Tsukuba, Japan
Speaker 4: Professor Tetsuo Ono
Hokkaido University, Japan
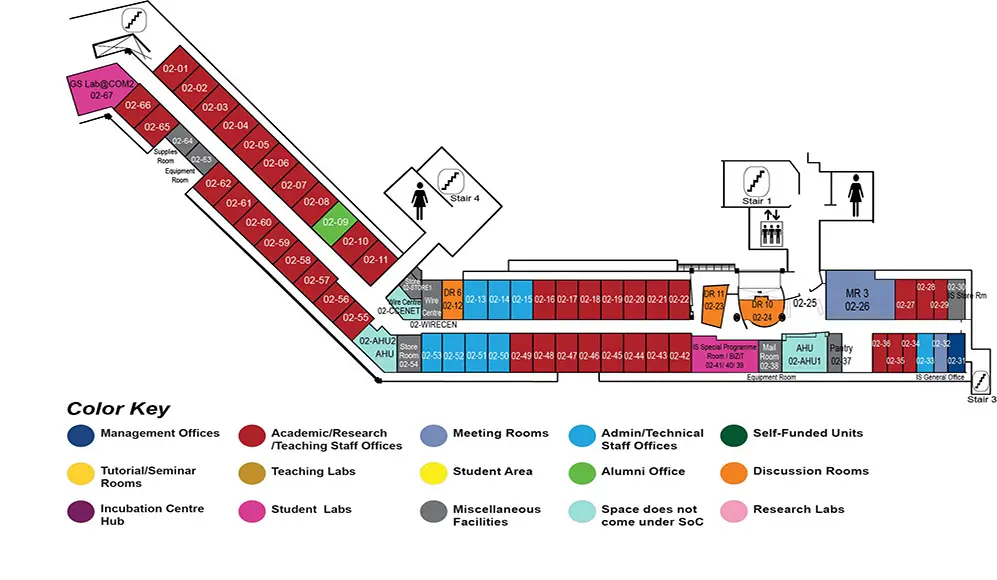
COM2 Level 2
MR3, COM2-02-26
Talk 1: Model of Strategic Behavior for Interaction that Guide Others Internal State
Abstract:
When we interact with other person, we need a knowledge on other's mind and consult it to decide action of our self. We call the knowledge Model of Other, MoO. To realize a cognitive architecture to interact with human, MoO must be embedded and used in a decision making process. But to design MoO, we must know how human interact in real world in MoO view because we aim a practical human interaction task. So, in this talk, I introduce a child-robot play experiment and its analysis on strategy embedded in the human behavior. From the result, we construct a model of emotion level mental status leading that may be a possible leading concept of human-agent interaction design.
Biodata:
Professor Takashi Omori completed the graduate program at the Graduate School of Engineering, University of Tokyo, in 1980 and became a research associate in 1981. He served as a lecturer from 1987, as an associate professor from 1988, and as a professor from 1998 in the Department of Electronic and Electrical Engineering, Tokyo University of Agriculture and Technology.
He became a professor since May 2000 in the Graduate School of Engineering, Hokkaido University, and is now a professor of Faculty of Engineering, Tamagawa University and Brain Research Institute of Tamagawa University from 2006.
He started his research field from a self-organizing model of NN, and it moved to more higher cognition process from vision, memory and development. His current interest is in a computational modeling of mental process between two interacting agent. He was a general co-chair of HAI2015, Korea. He is serving as a president of Japanese Cognitive Science Society from 2015.
Talk 2: Interaction Design for HRI
Abstract:
The relation between human and a robot is important when they share information via a communication. I would like to show several experiments to establish the relation for HRI in my talk. You can find that roper behavioral designs are significant for a robot to give a human information with a verbal expression.
Biodata:
Michita Imai is a Professor of Faculty of science and technology at Keio University and a Researcher at ATR Intelligent Robot Laboratories. He received his Ph.D. degree in Computer Science from Keio Univ. in 2002. In 1994, he joined NTT Human Interface Laboratories. He joined the ATR Media Integration & Communications Research Laboratories in 1997. He was a visiting scholar of University of Chicago from 2009-2010. His research interests include autonomous robots, human-robot interaction, speech dialogue systems, humanoid, and spontaneous behaviors. He is a member of Information and Communication Engineers Japan (IEICE-J), the Information Processing Society of Japan, the Japanese Cognitive Science Society, the Japanese Society for Artificial Intelligence, Human Interface Society, IEEE, and ACM.
Talk 3: Human-Agent Interaction: Utilizing Social Intelligence with Agential Triggers
Abstract:
Human-agent interaction (HAI) has become an important field in the field of human-computer interaction. The agent in HAI behaves with users as if it has its own intentions. It triggers users' social responses, and instructs users through social channels. The use of HAI is widespread from the field of entertainment to medical purposes. The tremendous success of these HAI agents has been supported by the intentional behaviors of agents. These agents are sometimes very simple, but if their behaviors are sufficient to trigger users' social acceptance, they are regarded as being agents. The key factor in agent design through HAI is whether it has necessary and sufficient triggering expressions to evoke users' social behaviors. The presenter explains the basis of HAI and shows studies of our HAI laboratory including several robots, ubiquitous applications, social simulation studies, and communication games.
Biodata:
Dr. Hirotaka Osawa is an assistant professor in University of Tsukuba. His research field is in human-agent interaction. His own research focuses on how human-like appearance and attitude improves interaction between a user and machines. He wants to create universal users interface experiences using our innate response to the world. His research interest is an improvement of today's complex household appliances. Dr. Osawa received his PhD in Engineering, MS and BS inComputer Science from Keio University.
Talk 4: Social Robots that Can Feel the Mood and Share Attention by Entertainment Effects
Abstract:
A social robot that communicates with humans should observe the social rule and share the attention with them. In this talk, I introduce a robot system that can recognize the state of a social space by using smart phones that users are equipped with. Moreover, I also introduce another robot system that can share the attention guiding the line of human's sight by entrainment effects.
Biodata:
Tetsuo Ono is a professor in the Graduate School of Information Science and Technology at Hokkaido University. His research interests include human-agent/robot interaction and cognitive interaction design. He has a PhD in Information Science from Japan Advanced Institute of Science and Technology (JAIST). He joined the ATR Media Integration and Communications Research Laboratories in 1997. He is a member of the Information Processing Society of Japan, the Japanese Cognitive Science Society, Human Interface Society, and ACM.